




神经力学实验装置系统(神经力学科研装置)
——人体运动的多尺度神经力学模型系统
系统功能概述:
研究人体运动源于神经、肌肉和骨骼系统之间的协调互动。检查骨骼、肌肉和神经系统的综合作用,以及它们如何相互作用以产生完成运动任务所需的运动。
旨在了解运动及其与大脑的关系。结合肌肉、感觉器官、大脑中的模式发生器和中枢神经系统本身的努力来解释运动的领域。
应用包括了解运动神经肌肉和肌肉骨骼功能的潜在机制,对复合神经肌肉骨骼系统中神经机械相互作用等缓解健康问题以及设计和控制机器人系统。
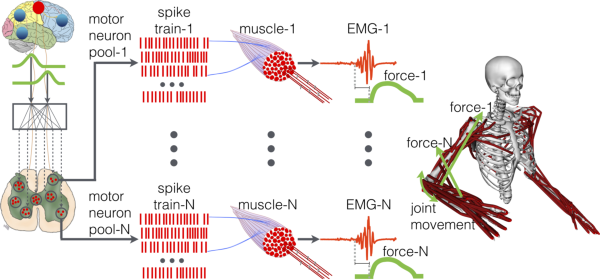
该设备开发综合多尺度建模方法,包括肌肉、骨骼和神经模型。使用的高密度肌电图 (HD-EMG) 与盲源分离相结合,将干扰 HD-EMG 信号识别到由同时控制许多
肌肉纤维的脊髓运动神经元放电的尖峰列车集合中。开发的由体内运动神经元放电驱动的多尺度肌肉骨骼建模公式,用于计算所得肌肉骨骼力的高保真估计。
这将使神经控制的肌肉组织如何与骨骼组织相互作用的分析能力前所未有,因此将为了解神经肌肉/骨科疾病的病因、诊断和治疗开辟新的途径。
- ●完整人体运动体内运动、动作、机械力协调互动的分析系统,全面、系统化的数据检测分析
- ●神经、肌肉和骨骼系统之间控制、协调、互动的分析评估
- ●骨骼、肌肉和神经系统综合作用运动、动作的实时捕捉、检查分析
- ●研究人体、人机运动动作及其与大脑、骨骼、肌肉之间的关系
- ●结合肌肉、感觉器官、大脑中的模式发生器和中枢神经系统本身解释运动的领域
- ●研究运动神经肌肉和肌肉骨骼功能的潜在机制
- ●复合神经肌肉骨骼系统中神经机械相互作用等健康问题
- ●其他神经与人体所有运动、动作关联问题
- ●确保组件间协同工作,为您独特的研究需求提供全面、系统化、高质量捕捉与数据分析
实时神经肌肉骨骼建模系统,神经动力学装置,神经肌肉控制人体运动,神经控制协调运动动作分析装置,神经肌肉控制人体运动分析系统,neuromechanics-system,人类运动行为实验,锻炼身体协调性分析检测系统,体内神经力学系统装置,神经力学模型系统


系统特点:
一套一站式交钥匙 3-D运动实时捕捉分析系统,旨在同步收集来自各种运动**、EMG(肌电图)、测力台、手传感器、EEG脑电图、
定量脑电图(quantitative EEG, qEEG)系统、数字视频、事件标记和其他模拟设备、虚拟现实和触觉设备的数据。
从丰富的分析工具集合中生成的数据可立即通过所有数据输出的图形显示进行回放。 令人惊叹的 3-D 计算机渲染对象动画可以被视为骨架、简笔画或人形。集成使用市场上
广泛的硬件实现对人体运动、大脑活动、眼球运动、肌肉募集和作用在身体上的外力的实时测量。
确保您选择的组件协同工作,为您独特的研究需求提供全面、系统化、高质量的数据。 数据完全同步,与其他组件准确.,并通过的计算机
渲染和图形显示实时呈现。 数据输出包括所有运动学和动力学数据,包括关节力和力矩,以及从虚拟环境同步接收的用户定义变量。 数据可在不需要编程的直观下拉菜单中使用。
用户编写的脚本可以定义额外的数据和事件,并与统计模块一起扩展该系统的固有功能。


允许用户对三维肌肉骨骼图形进行建模、动画制作和测量以及神经控制协调。肌肉骨骼模型包括骨骼、肌肉、关节、韧带和其他可由用户通过图形界面操纵的物理结构的表示。这些模型可以用来模拟任何数量的运动,如步行、骑自行车、跑步、跳跃、举重和投掷。
- 动作捕捉导入器–可以导入运动捕捉文件(C3D、TRB、TRC)进行回放和测量。它还可以从运动分析系统实时导入数据,并在捕获数据时制作三维模型的动画。
- 步态报告–运动报告工具创建一组运动的报告,包括步态。这些报告包含平均值、标准偏差和数据比较。对于步态报告,该工具计算步态事件,并自动将记录的运动分为左右步幅。包含格式化的Excel图表,以便于比较或研究数据。
- 脚本–脚本工具使用命令执行脚本,以加载模型和运动数据、执行动态模拟以及创建绘图和报告。脚本也可用于保存工具设置,以便下次启动或加载特定模型时恢复这些设置。
- 模型缩放–缩放实用程序会根据静态运动捕捉试验的测量结果,自动缩放通用模型以匹配任何尺寸的个体。包括肌肉路径在内的所有模型组件都会随着身体部分进行缩放。
- 肌肉包裹–用户可以交互定义球体、椭圆体、圆柱体和鸟居,以供肌肉肌腱执行器包裹。肌肉路径会在这些对象上自动计算,从而可以为包裹的肌肉计算肌肉长度、力量和运动手臂。
- 现场直播–只要肌肉的任何属性发生变化,肌肉属性的实时图就会更新。这允许用户立即观察移动附着点、缠绕对象或任何其他属性对肌肉长度、力臂和力的影响。
- 骨骼变形–用户可以将骨骼扭曲成新的形状,以模拟各种类型的骨骼畸形,如胫骨扭转或股骨前倾。
- 视频导入/导出–运动数据视频可以在运动动画期间导入并在虚拟屏幕上播放。这使得模型动画和实时视频的比较变得容易。视频也可以从模型窗口导出到AVI文件。
- 外皮–蒙皮是指链接到一个或多个身体部分的三维多边形表面。通过链接到一个或多个身体部分,可以使皮肤在关节移动时变形。皮肤可用于表示解剖皮肤、肌肉表面、韧带或其他表面。它们也可以用纹理贴图渲染,以增强真实感。
- 图像使用者界面–更新的用户界面元素使与模型交互以及更改骨骼、肌肉和其他组件的显示属性变得容易。该系统现在支持“拖放”,可以轻松加载模型或运动数据,并执行添加骨骼或运行脚本等功能。
- OpenSim兼容性–可以与OpenSim连接,OpenSim是一个开源软件系统,允许用户创建和测量运动的动态模拟。OpenSim通过提供额外的动力学特性,包括残余减少和计算肌肉控制,扩展了该系统的功能。OpenSim可以导入和导出该系统模型,允许用户利用这两个应用程序的功能。
实时神经机械建模,神经力学模型系统,生物力学运动控制协调研究,实时 EMG 驱动的肌肉骨骼建模,神经肌肉骨骼模型,运动功能身体活动和健康间的相互作用,Neuromechanical Kinesiology,人体运动的多尺度神经力学模型,刺激肌肉力量调节分析系统,人体体内神经肌肉骨骼功能分析完整
力量和调节
提供用于动作捕捉的硬件和软件的交钥匙包,根据力量和调理人士的需求量身定制。


可视化人体肌肉骨骼系统,神经运动控制分析系统,运动控制与运动再学习,neuromechanics-system,人体运动功能重建模型,神经力学模拟仪器设备,神经力学模型装置,神经力学运动机能学,运动动作EEG分析系统,肌肉激活力量调节分析系统
之运动平衡评估介绍:
分析和跟踪受试者生物力学能力的变化,监测肌肉募集并分析感觉组织
特点:
1、立即评估
输出同步压力中心和运动学数据,以及用户定义的测量值,包括局部和全局大/小摇摆和运动范围。 实时提供此信息,以便为您的受试者提供即时的表现反馈。
2、实时生物反馈
通过音调和视觉提示提供实时生物反馈,以跟踪和扩展任何身体部位的运动范围。 监测肌肉募集的时间和存在以优化平衡策略。
3、集成外围数据
通过同步脑电图、眼动追踪、数字参考视频、虚拟现实和肌电图扩展运动学和地面力数据收集,以调查有助于平衡和姿势控制的所有神经肌肉因素。 可以随时间添加硬件以扩展功能。 所有数据源都可以同步收集,也可以通过单击按钮单独收集。
4、分析
利用 该系统 的非线性分析功能,例如熵和分形维数,可以更完整地评估稳定性。
5、动态跑步机控制
使用 该系统 的双向实时接口控制 Bertec 的仪表跑步机,以控制皮带速度。 根据运动学数据修改皮带速度以进行自定步调步行和跑步,或在数据收集期间应用用户定义的扰动以评估姿势控制



神经肌肉控制实验模型,人类运动行为实验装置,人机交互神经肌肉骨骼模型,神经控制运动生物力学系统,人体神经肌骨系统运动协调及其控制,运动控制与运动训练系统,神经动力学与力学实验装置,神经动力学模型装置,人体运动神经力学系统,人体神经肌肉系统多尺度建模装置
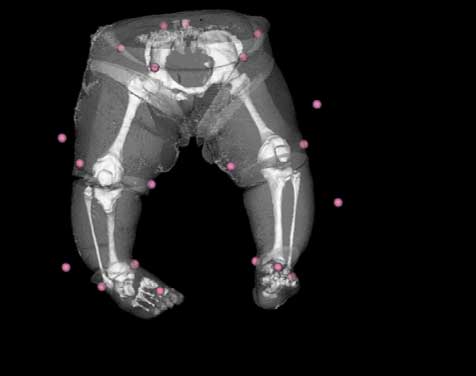
6、根据一个人的步态模式预测个体的骨骼生长
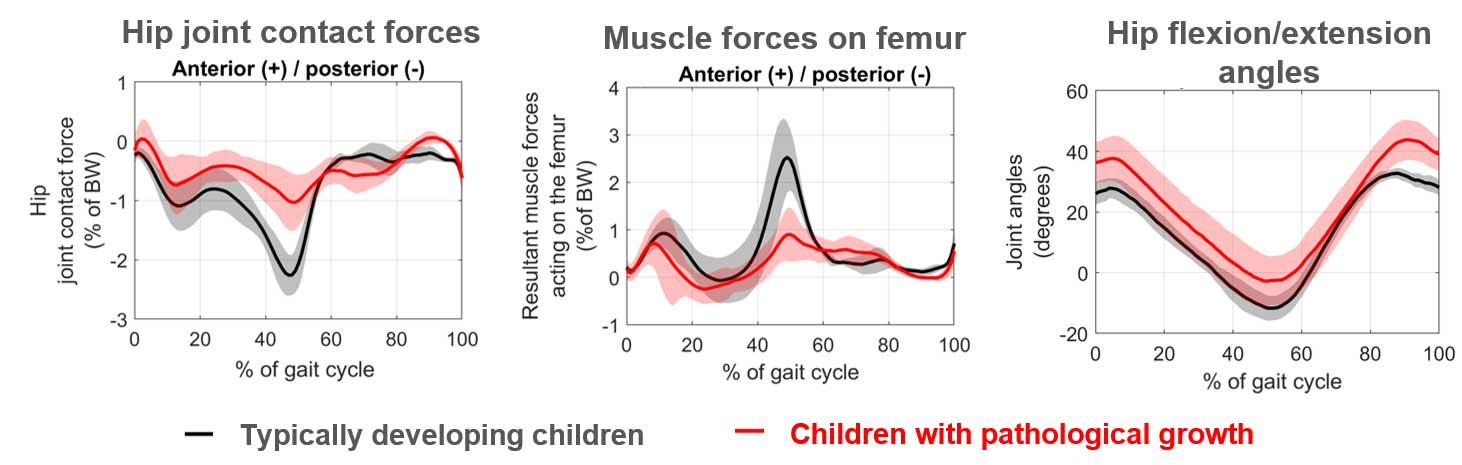
- 由于骨骼的病理负荷,许多儿童在成长过程中会出现骨骼畸形
- 矫正性截骨术,例如去旋转手术,用于矫正过度畸形
- 儿童骨骼的机械反应提供了一个令人兴奋的机会,可以在早期纠正负载环境,避免骨骼畸形的发展
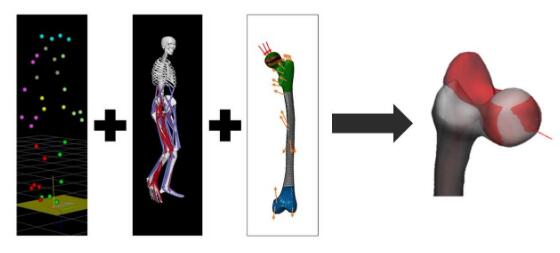
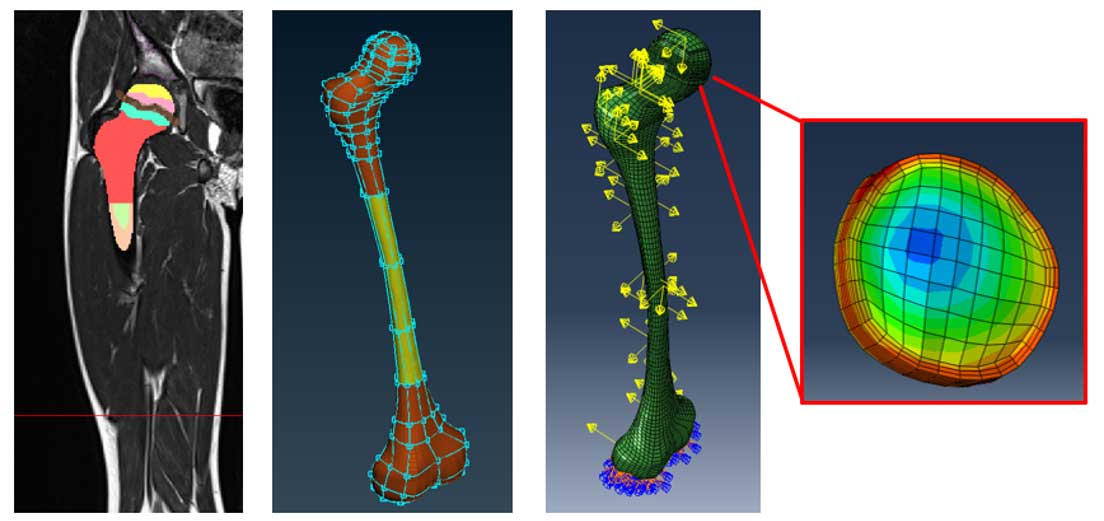
- 我们使用基于神经肌肉骨骼和有限元模型的多尺度模拟来预测股骨的生长趋势,并研究什么样的负荷特性会导致典型的病理性生长
- 为了验证我们的机械生物学生长预测,我们将我们的模拟结果与从两次采集的磁共振图像中获得的股骨几何形状的实际变化进行了比较
- 调查临床干预对肌肉骨骼负荷和股骨生长的影响,使我们能够确定哪些早期干预有可能使股骨生长正常化
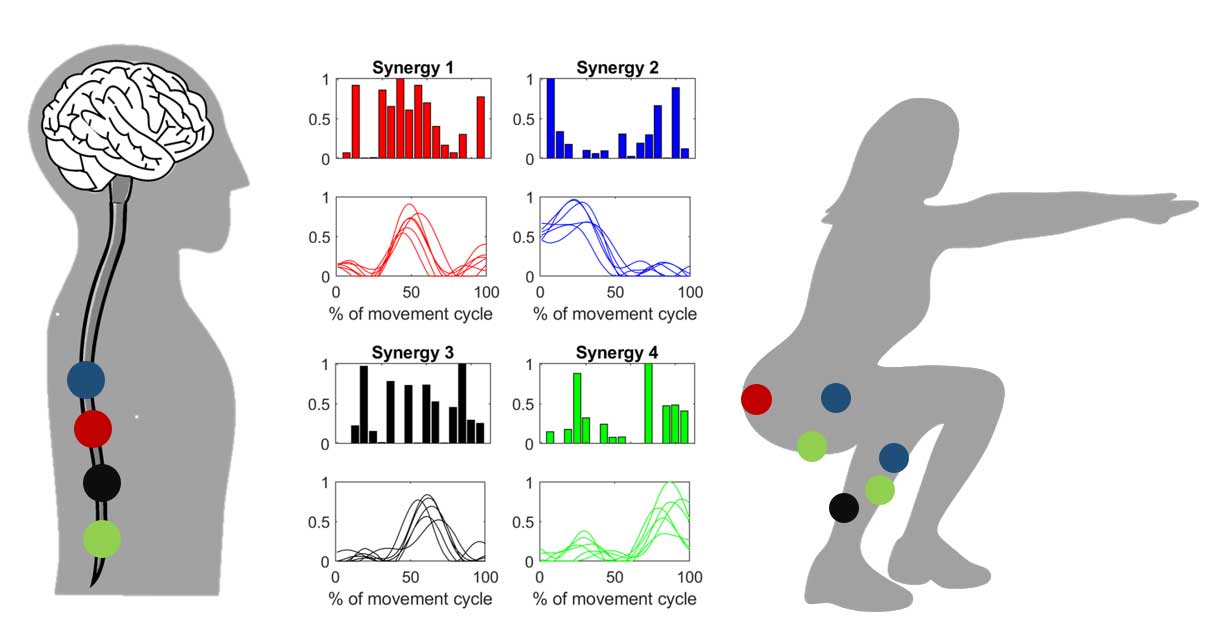

- 从简单的直立到复杂的运动,肌肉力量对于任何积极的人体运动都是必要的
- 肌肉由神经电指令控制
- 肌电图记录捕捉导致肌肉收缩的电信号,并能为神经肌肉控制策略提供见解
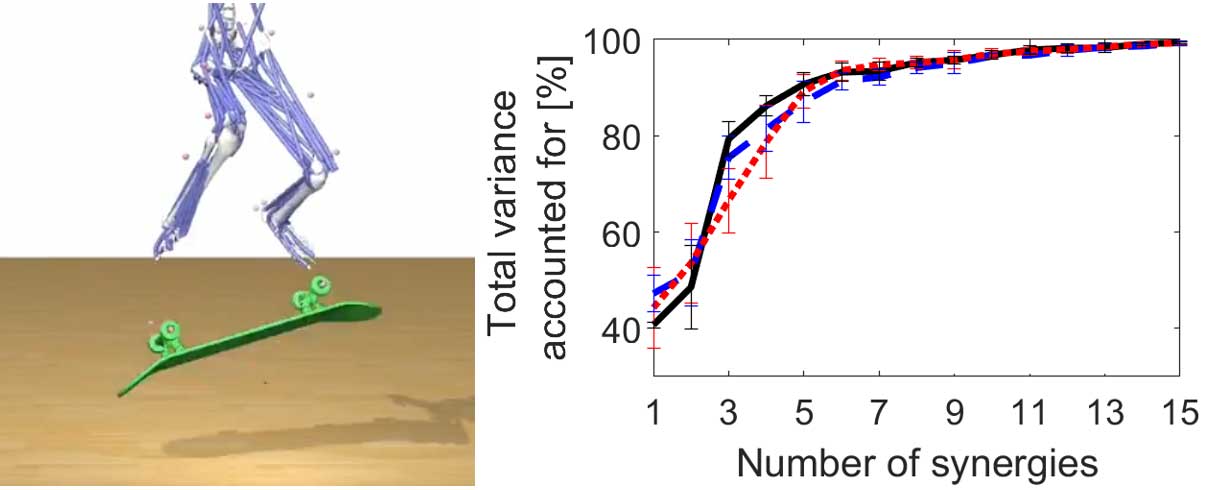
- 中枢神经系统被认为使用特定任务的运动模块,称为肌肉协同,来降低运动控制的复杂性
- 肌肉协同作用可以从肌电图记录中计算出来,并用于运动控制研究
- 我们使用肌肉协同分析来研究人类如何完成复杂的运动和学习新的运动任务
4、估计健康和病理人群在不同运动期间的肌肉骨骼负荷



跨时空尺度神经肌肉骨骼模型系统装置,运动动作控制分析系统,神经力学实验设备,神经力学建模,多尺度神经力学模型装置,运动动作肌肉激活募系统,神经运动协调模拟分析系统,神经控制协调运动动作系统,实时神经肌肉骨骼建模系统,神经肌肉控制实验设备
- 由于不适当的重复运动导致的肌肉骨骼系统的过度负荷会导致损伤
- 建议进行肌肉强化练习,以防止受伤并加速康复
- 许多锻炼和康复建议是基于好意见,而不是基于证据的研究
- 我们使用神经肌肉骨骼模拟来增加我们关于运动和锻炼对肌肉骨骼系统负荷的影响的知识
- 在我们的运动分析实验室,我们收集和分析来自不同人群的数据,包括运动员,例如和业余舞蹈演员、肥胖儿童和健康成人
- 我们的研究结果可能有助于预防未来的伤害,并设计基于证据的康复计划
我们与人类中枢神经系统建立了临床上可行的接口,使我们能够接触到神经细胞的功能,如脊髓运动神经元。我们构建了人类神经-肌肉-骨骼系统的特定受试者多尺度模型,该模型可以将神经记录转化为对完整运动人体体内终机械功能的准确预测。
9、实时神经机械建模
当前的临床生物力学涉及冗长的数据采集和耗时的离线分析。我们开发了用于实时分析完整人体体内神经肌肉骨骼功能的创新方法。这将推动医疗技术的发展,包括内部机械力的实时生物反馈和患者-机器接口。
10、基于外骨骼模型的控制
我们开发了的在线肌肉骨骼建模方案,可以预测个体的神经肌肉骨骼系统如何对与残肢平行连接的可穿戴设备做出反应。我们使用动态模拟来预测复杂机器人外骨骼的机械功能。这些信息被实时用于为可穿戴机器人创建新的基于模型的控制范例,这些范例可以恢复或增强人类的运动能力。
11、基于假肢模型的肌电控制
我们根据脊髓运动神经元的放电时间和肌肉骨骼水平上新出现的物理行为的准确预测,定义并实验测试了新的人机界面。这导致了新的基于模式的仿生肢体肌电控制方案。解释个体神经肌肉骨骼系统的人机界面的发展将为通过仿生可穿戴辅助技术解决临床相关康复挑战带来前所未有的机遇。
12、运动增强技术
在“flex张力项目”的框架下,我们与杜氏亲代项目合作,开发和测试各种技术,用于杜氏肌营养不良症患者的意图检测及其与主动上肢辅助设备的整合。我们的目标是将这些技术转化为用户,这就是为什么我们的目标是以用户为中心的设备设计和意图检测开发。我们也对手功能的研究感兴趣,尤其是对患有糖尿病的人。
更多详细方案,请咨询产品顾问:李经理,18618101725

我公司另外同一站式细胞组织材料生物力学和生物打印等生物医学工程科研服务-10年经验支持,
神经调节机制作如下基础性论述。
人体重要的运动反射—牵张反射
人体中存在神经支配的骨骼肌在受到外力牵拉时所能引起的受牵拉的同一块肌肉的反射活动在生理学中被称作牵张反射。牵张反射目前被分为两种类型,既腱反射和肌紧张两种。
2.1 腱反射是指快速牵拉肌腱时所发生的牵张反射 例如,叩击膝关节下的股四头肌肌腱,股四头肌既发生一次收缩,既为膝反射;又如,叩击跟腱使小腿腓肠肌发生一次收缩的牵张反射被称为跟腱反射;而肘反射是指叩击肱二头肌引起的肘部屈曲的牵张反射。一般认为腱反射的传入纤维直径较粗(12~20μm),其传导速度也较快(90m/s以上),其反射的潜伏期较短约0.7ms,故只能够一次突触接替的时间延搁,因此腱反射是单突触反射。腱反射的感受器是肌梭,中枢在脊髓前角,效应器主要是肌肉收缩较快的快肌纤维成分,故有时又被称之为位相性牵张反射。
2.2 另一种重要反射类型—肌紧张 肌紧张是维持人体正常姿势基本的反射活动,是姿势反射的基础。例如,人体取直立姿势时,由于重力的作用。其头部将向前倾,胸和腰将不能挺直,髋关节和膝关节也将屈曲,但由于骶棘肌以及颈部某些肌肉群及下肢的伸肌群等的肌紧张加强,所以人体就能抬头、挺胸、伸腰、直腿,从而保持直立的姿势。肌紧张的感受器也是肌梭,但中枢的突触接替有可能不止一个,而是多个,可能为多突触反射,效应器主要是肌肉收缩较慢的慢肌纤维成分。由于肌紧张的反射收缩力量并不大,只是抵抗肌肉被牵拉,表现为同一肌肉的不同运动单位进行交替性收缩,而不是同步收缩,不表现出明显的动作,所以肌紧张能持久地进行而不易发生疲劳。
牵张反射主要是使受牵拉的肌肉发生收缩,但同一关节的协同肌也能发生兴奋,而同一关节的拮抗肌则受到抑制(交互抑制),但并不影响其他关节上的肌肉运动。虽然屈肌和伸肌都产生牵张反射但脊髓的牵张反射主要表现在伸肌。屈肌的牵张反射不明显,主要表现为它的拮抗肌(既伸肌)受到了抑制。牵张反射,尤其是肌紧张的主要生理意义在维持站立姿势,因此伸肌比屈肌的牵张反射明显更符合人体生理情况。牵张反射的基本反射弧较为简单,但整体上牵张反射受高位中枢调节,而且可以建立条件反射。腱反射的减弱或消退,常提示反射弧的传入、传出通路或脊髓反射中枢的损害或中断;而腱反射的亢进在临床中常提示有高位中枢病变,如高位节瘫。因此,临床上常常通过检查腱反射来了解神经系统的功能状态。
C-702 Cefpirome Sulfate with Sodium Carbonate 硫酸头孢哌隆与碳酸钠 http://www.bioleader.cn/bioleader_Product_2063223296.html?_v=1630322270
铜纳米线 http://www.bioleader.cn/bioleader_Product_2063186814.html?_v=1630322487
机械驱动场细胞电位记录分析系统产品介绍 http://bioon.com.cn/product/Show_product.asp?id=389629
纳米仿生拓扑结构机械力现货 批发商 http://www.bioleader.cn/bioleader_Product_2064197844.html?_v=1630322082